
近日,机械与汽车工程学院杨四阳团队在交通运输领域权威期刊《IEEE Transactions on Transportation Electrification》(一区Top,IF 8.3)发表题为“Adaptive Robust Constraint-Following Control With Prescribed Performance for Quadrotor AAV Subjected to Time-Varying Uncertainties”的研究成果,杨四阳博士为论文第一作者。安徽工程大学为第一署名单位。
研究团队聚焦四旋翼无人机在时变不确定性(含快速时变)影响下难以兼顾预设性能与鲁棒稳定性的控制难题,通过引入剪切映射误差变换函数(SMETF)从根本上规避传统预设性能控制(PPC)中的奇异性问题,并设计基于泄漏型自适应律的鲁棒约束跟随预设性能控制器,在无需不确定性先验知识的条件下有效抑制时变干扰,为无人机在复杂动态环境下的高精度、高可靠性控制提供了创新解决方案。
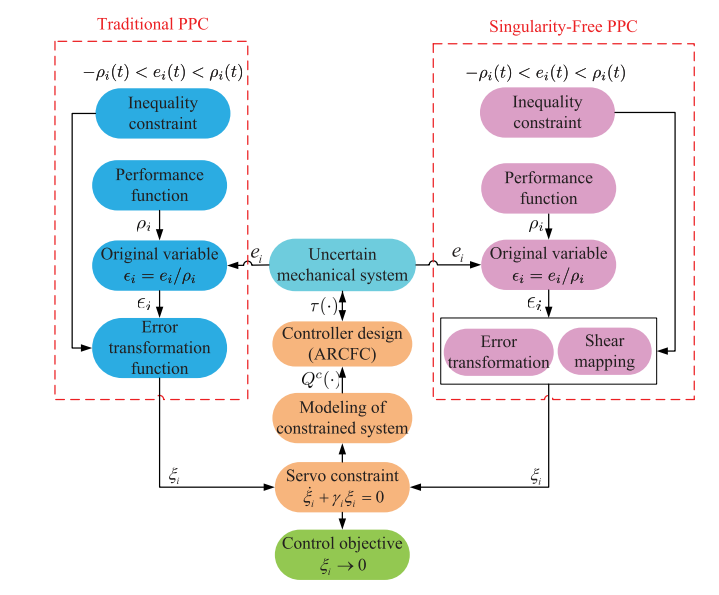
PPC与SFPPPC控制器设计流程
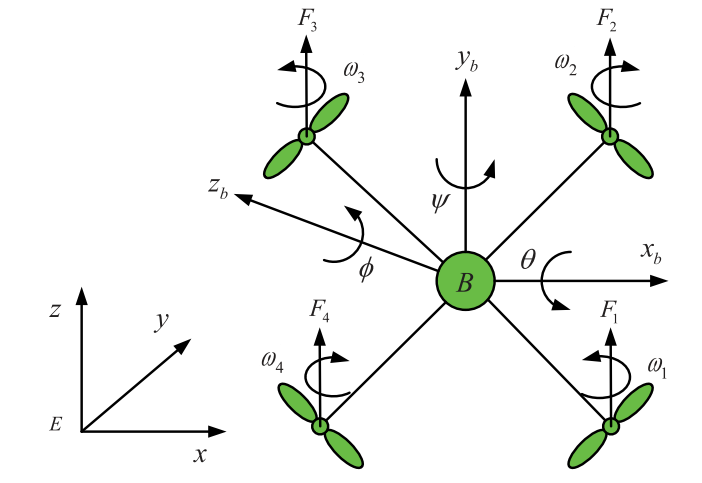
四旋翼无人机(AAV)结构示意图