
近日,机械与汽车工程学院时培成教授团队在人工智能应用领域顶级期刊《Expert Systems With Applications》(一区TOP,IF=7.5)发表题为“PolarLane: Robust BEV Lane Detection based on Polar Coordinates”的研究成果,安徽工程大学为第一署名单位。
团队聚焦现有技术感知空间表征与传感器物理模型之间存在错配的问题,通过将检测空间建模为极坐标系的方式,避免了BEV空间的特征失真问题;通过设计滑动条状窗口卷积、注入透视几何先验的极坐标编码器,并结合全局拓扑建模,在多个国际权威数据集上取得了最先进的检测精度,为自动驾驶3D感知提供了新的思路。
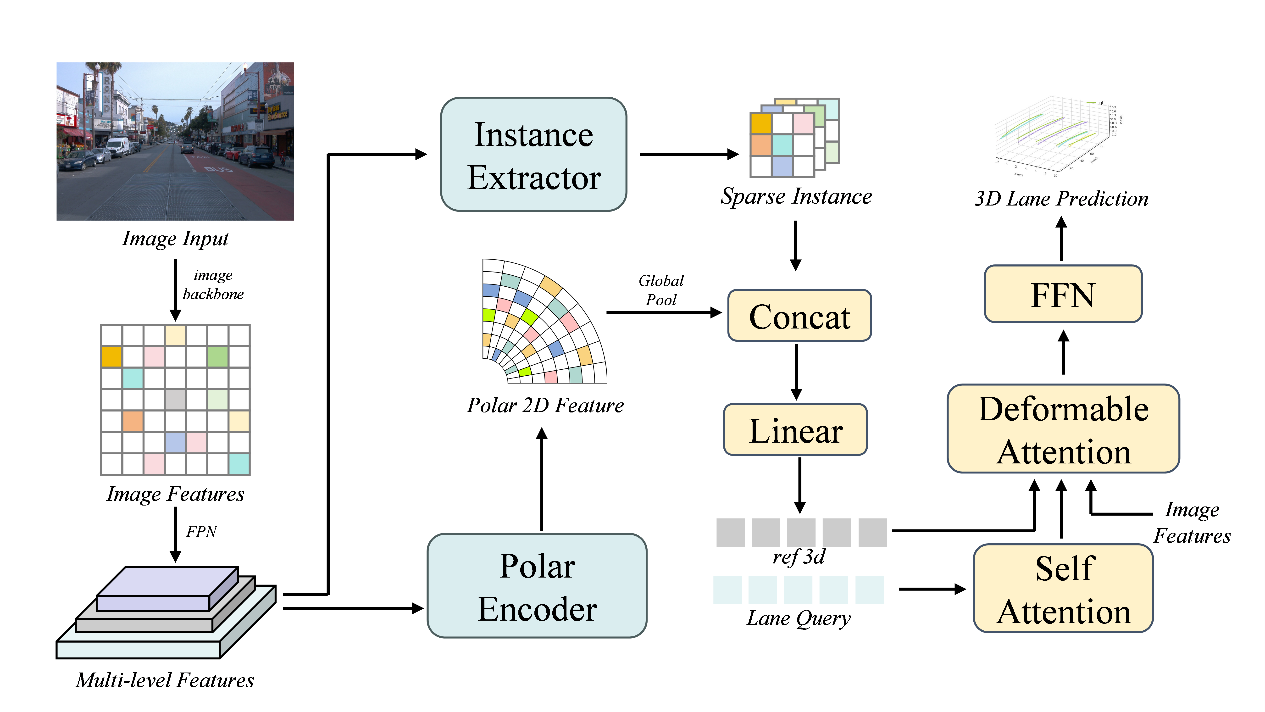
研究团队将三维检测空间参数化为径向距离、方位角和高度,针对车道线在图像中呈现的细长径向分布特征,设计了滑动条状窗口卷积机制,其长条状卷积核沿极坐标角度方向滑动,有效缓解了对细长结构的截断效应,且其轴向与车道线的径向延伸方向高度一致。为进一步注入物理先验,团队通过极坐标编码器显式编码了两类关键几何信息:像素到图像中心的径向距离(直接反映物体在3D空间中的远近)以及由相机内参计算出的精确视角(建立角度坐标与真实3D方向的对应关系),并将其转化为高维特征与图像特征深度融合。为应对极坐标特征在多车道实例混淆和遮挡情况下的特征模糊问题,团队额外设计了一个轻量级的实例提取器,并对车道进行全局拓扑建模。实验表明,在最具挑战性的OpenLane数据集上,该框架的F1分数达到62.2%,超越现有主流方法;在ONCE-3DLanes数据集上,其中心线距离误差低至0.049米;同时,在RTX 3080显卡上能实现20 FPS的实时检测速度。该研究为自动驾驶3D车道线检测提供了全新的几何表征研究范式。
附全文链接:https://www.sciencedirect.com/science/article/pii/S0957417425038564?pes=vor&utm_source=clarivate&getft_integrator=clarivate